
 RBF 解算器使用说明
RBF 解算器使用说明
# RBF 解算器使用说明
# 使用说明
RBF绑定解算器是一种基于样本插值的驱动技术:你只需提供驱动骨骼在不同姿态下对应的被驱动骨骼的目标pose样本,解算器会自动分析这些样本空间关系。运行时,根据驱动骨骼的pose,利用径向基函数(RBF)在样本中加权插值,直接计算出合适的被驱动骨骼pose——无需构建繁复的骨骼约束或表达式驱动链条,专注于“输入-输出”pose对即可实现自然、平滑的次级动画效果。
常见应用:
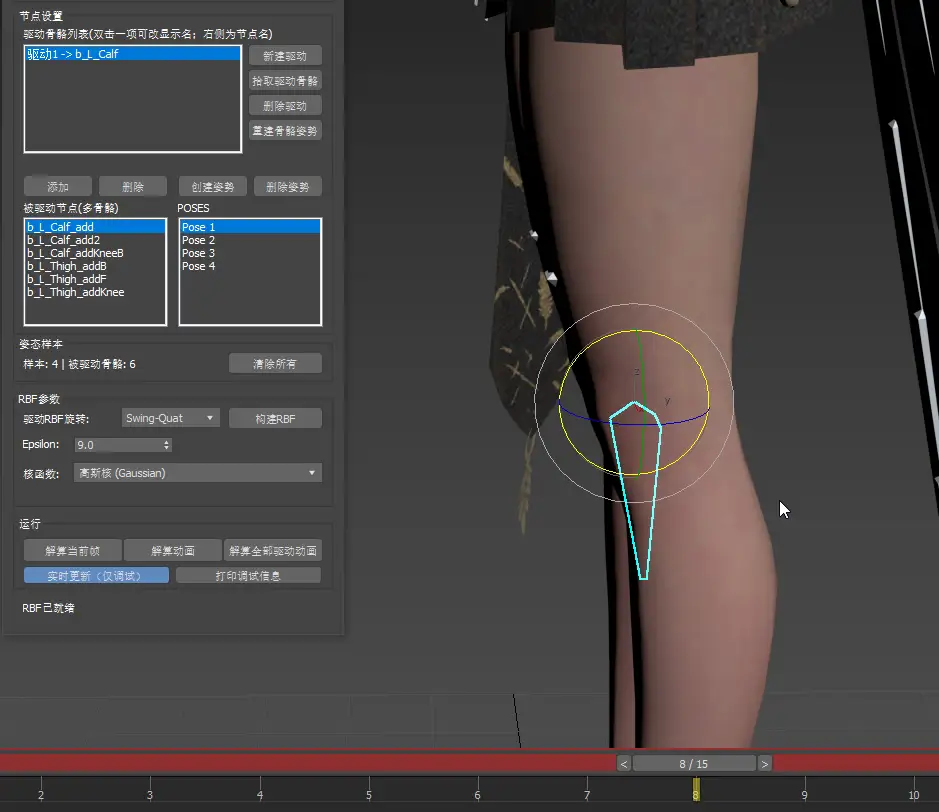
- 裙摆交互:大腿作为驱动骨骼,裙摆第一节骨骼作为被驱动骨骼,RBF自动学习走路、奔跑时大腿对裙摆的推挤效果,避免穿插。
- 关节修型:膝盖、手肘、肩膀等弯曲时,驱动骨骼角度变化驱动辅助矫正骨骼或直接修型BlendShape,解决弯曲塌陷问题。
- Twist过渡:手腕、前臂的扭曲运动中,RBF可根据腕部旋转角度,自动分配上臂、下臂及中间Twist骨骼的旋转权重,实现平滑的扭转变形。
# 开发节点
工具原型开发(开始2026-4-28 ~)
[X] 驱动配置保存到 .Max文件,打开插件即可自动加载配置。
[ ] RBF驱动镜像,例如设置好左腿驱动,直接镜像到右脚。
[ ] 匹配目标POSE范围的可视化,参考 UE5中的PoseDriver 节点。
[ ] 多驱动模式,当前的RBF仅支持一个驱动骨骼。 需扩展多个驱动骨骼控制一个被驱动骨骼,例如裙摆的中间骨骼被左右腿控制。
[ ] Twist-x模式算法改进,需要累计Twist角度判断正反旋转,当前版本容易出现Twist骨骼前后帧旋转角度不连续问题。
[ ] C++ 实时解算版本。
现在想要插件的 捐赠 20 之后找我要一个邀请码,然后注册NDBox账号,在用户中心的【内测资源】下载插件。(网站关于页面中有收款码),想白嫖请等到2026-08-01 更新天晴盒子。
使用过程中任何问题可联系我解决。
# 环境与运行方式
- 软件:Autodesk 3ds Max 2015 +
- 运行:直接将工具拖拽进3dsMax窗口即可。
# 核心概念
| 术语 | 含义 |
|---|---|
| 驱动骨骼(Driver) | 拾取的单一节点;其相对父级的局部旋转四元数作为 RBF 输入特征的来源。 |
| 被驱动列表(Driven) | 可多选添加的多根骨骼;每个姿态样本记录它们的局部 Position / Rotation / Scale。 |
| 姿态样本(Pose) | 某一时刻下:驱动局部四元数 + 所有被驱动局部 TRS 的一组快照。第一个样本在 Twist/Swing 模式下作为「绑定参考」,用于计算相对旋转 |
| 构建 RBF | 根据当前模式与样本,计算核矩阵并求逆(或缓存特征),将isBuilt置为可用。 |
| 配置(Config) | 内存中一套或多套「驱动配置」;可保存/加载为INI 文件。 |
| 驱动槽(Driver Slot) | 同一 INI「配置」下的多套独立驱动:每槽有各自的驱动骨、被驱动、样本与 RBF 参数,可在列表中切换。 |
# 界面分区说明
# 驱动配置
- 下拉列表:在多条内存配置之间切换;切换前会保存当前编辑到该配置项。
- 新建 / 删除:增加或删除整条配置(至少保留一条)。
- 保存 / 加载:将当前所有配置序列化为
.ini,或从文件反序列化。 - 存场景: 将当所有配置序列化为
.ini并保存到场景中,打开插件时将自动加载配置。 - 读场景: 手动读取当前场景中的 驱动配置。
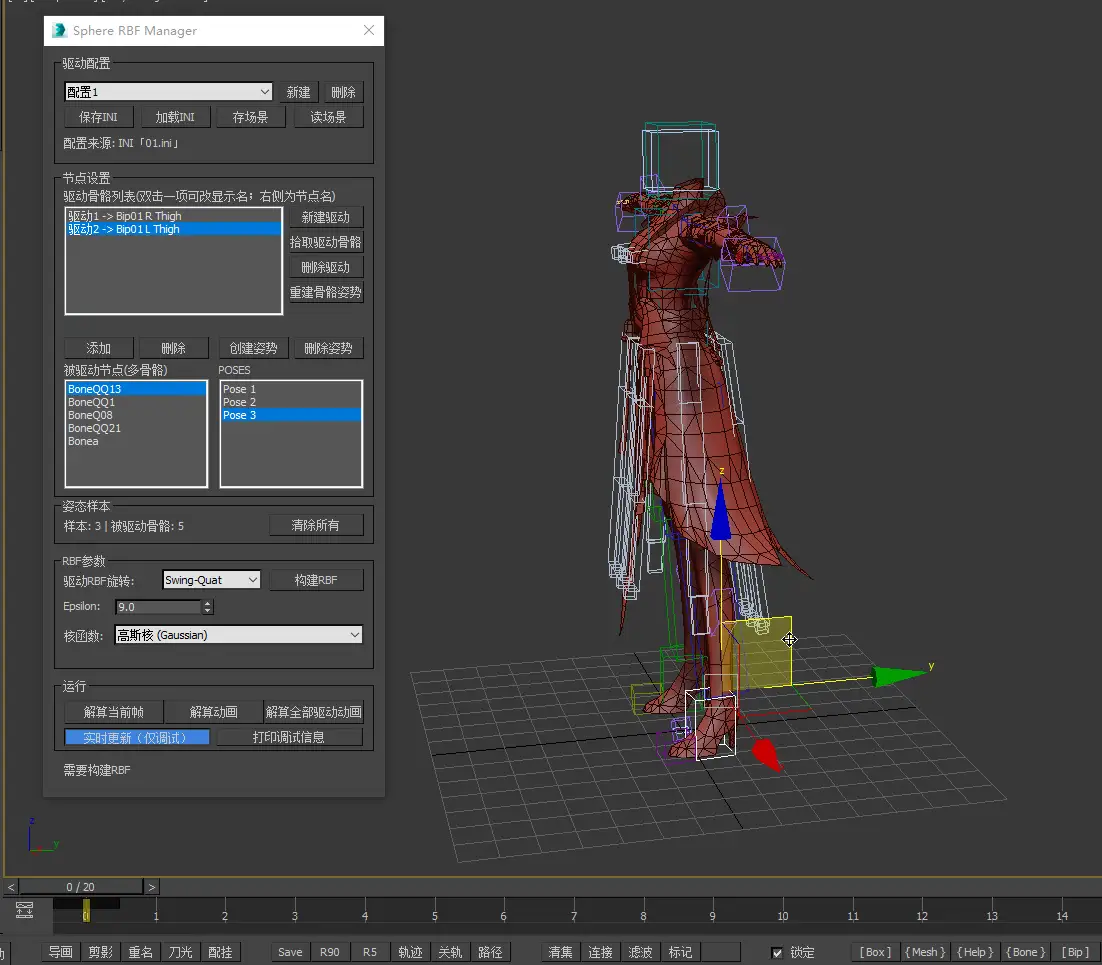
# 节点设置
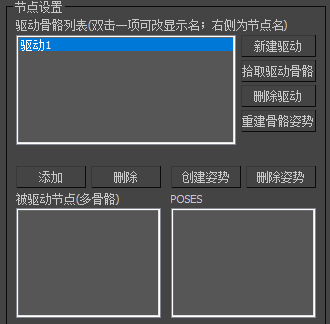
驱动骨骼列表:同一文件配置内的多个「驱动槽」。单击切换槽位;双击可修改槽在列表中的显示名称(不影响节点名)。
新建驱动 / 删除驱动:增减驱动槽(至少保留一个槽)。
拾取驱动骨骼:为当前槽指定驱动节点。
重建骨骼姿势: 先清理驱动和被驱动骨骼的动画,再以一帧间隔将样本POSE设置到驱动和被驱动骨骼上,方便调试Pose。
添加 / 删除(被驱动) :从当前选择批量加入被驱动列表,或删除列表选中项。增删被驱动后,各姿态里的通道数会自动对齐(新增通道可能为
undefined,需补录姿态)。创建姿势:弹出对话框输入姿态名,记录当前驱动局部旋转与各被驱动局部 TRS。
删除姿势:删除最后一个姿态样本。
POSES 列表:双击某条可修改该姿态的显示名称。
# 姿态样本

- 显示样本数与被驱动数量摘要。
- 清除所有:仅清空所有姿态样本与 RBF 构建缓存;不清除当前驱动骨、被驱动列表、核类型、Epsilon、旋转模式等(确认框中有说明)。
# RBF 参数
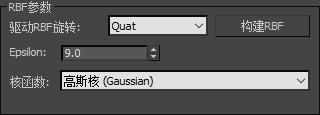
- 驱动 RBF 旋转:见下文 驱动旋转模式。
- Epsilon:核函数尺度参数( spinner 与内部
sphereRBF.epsilon同步)。 - 核函数:Gaussian / Multiquadric / Inverse Multiquadric / Thin Plate(界面为中文标签)。
- 构建 RBF:应用当前参数并尝试构建;样本数须 ≥ 2。
说明:脚本内 正则化(regularization) 在 UI 中默认隐藏,构建 Twist/Swing 时会在内部临时放大正则以避免病态矩阵,构建后恢复原值。
# 运行
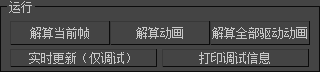
解算当前帧:按当前时间驱动读值,对被驱动写插值结果。
解算动画:在当前 animationRange 内烘焙;可选仅在有驱动关键帧的时间采样。
解算全部驱动动画:对当前配置文件中所有驱动槽依次执行动画烘焙。
调试信息:在 Listener 输出管理器与插值器状态;样本足够时还会测试距离分布。
实时更新调试:如下视频
# 推荐工作流程
- 保存 Max 场景,确认驱动骨层级与轴向符合绑定规范。
- 运行脚本打开面板,必要时 加载 已有 INI 或 新建配置。
- 选中目标驱动槽 → 拾取驱动骨骼 → 添加 被驱动骨骼(可多选)。
- 摆好 绑定 / T-Pose(或文档约定的参考姿势) → 创建姿势,命名为例如
Bind 或Pose 1(作为样本 1)。 - 依次摆出其它关键姿势,多次 创建姿势(至少 2 个样本)。
- 选择合适的 驱动 RBF 旋转 模式与 核函数,调节 Epsilon,点击 构建 RBF。
- scrub 时间轴用 解算当前帧 检查;满意后用 解算动画 或 解算全部驱动动画 烘焙。
- 保存 INI 以便下次加载或与同事共享(注意节点句柄与会话绑定,见下文)。
# 驱动旋转模式(Quat / Twist-X / Swing-Quat)
界面三项与内部枚举对应关系:
| UI | 内部模式 | 含义概要 |
|---|---|---|
| Quat | #full | 使用相对绑定后的完整局部旋转四元数;样本间距离为S³ 上归一化测地角(实现于SphereQuatData.sphereDistanceTo)。 |
| Twist-X | #twist_angle | 仅保留绕骨骼局部 X 轴的扭转分量;构建时用扭转特征四元数间的圆上距离。求值阶段使用IDW(反距离平方)权重,避免出现负 RBF 系数,并与帧间半球连续性处理配合。 |
| Swing-Quat | #swing_quat | Swing-Twist 分解后取Swing部分;RBF 距离定义为局部 X 轴被旋转后的单位方向在球面S²上的夹角除以 π(不是Swing 四元数在 S³ 上的测地距)。求值同样走IDW权重。 |
务必注意:
- 切换模式、修改 第一个样本、或改动驱动局部绑定关系后,应重新 构建 RBF。
- Twist/Swing 语义依赖「样本 1」作为绑定参考;文档与tooltip强调:第一个样本请保持蒙皮/绑定参考姿势。
# RBF 参数与核函数
- Epsilon:控制核函数随距离衰减或增长的快慢;过小可能导致过拟合或数值不稳定,过大则过渡平滑、细节不足。需结合姿态间距与模式试验。
- 核类型:与高斯、多二次、逆多二次、薄板样条等经典 RBF 核一致(实现见
SphereRBFInterpolator.rbfKernel)。
若 Listener 出现「原始系数和≈0」类警告,脚本会退回均匀权重;可尝试调整 Epsilon、检查样本分布或重建。
# 解算与动画烘焙
- 局部空间:采样与写回均基于节点 相对父级的变换(
getNonePoseTm /getNonePoseTmRot一类接口)。 - 四元数混合:对被驱动旋转采用与样本对齐半球后的加权混合策略(避免路径翻转)。
- 动画范围:烘焙使用当前时间轴
animationRange.start 与animationRange.end。
请在烘焙前确认时间范围覆盖所需片段,并做好场景备份。
# 配置文件(INI)格式
- 扩展名:
.ini - 顶层
[Meta]:ConfigCount、CurrentIndex(当前选中的配置序号)。 - 每个配置:
[Config_i]保存配置名、驱动槽数量、当前槽索引。 - 每个驱动槽:
[Config_i_Slot_j] 保存该槽显示名、RBFManagerData 扁平字段(驱动句柄/名称/父名、被驱动列表、Epsilon、正则、核类型、DriverRotationMode、样本数等)。 - 每个姿态:
[Config_i_Slot_j_Pose_k] 保存姿态名、驱动四元数字符串、每条被驱动的#(pos, quat, scale)字符串。
脚本 兼容旧版 INI:若某 Config_i 下没有 DriverSlotCount,则把整个节当作单槽扁平数据读入。
保存时会写入当前内存中全部配置;加载会替换 rbfConfigList 并刷新 UI。
# 节点解析与场景迁移
INI 中除节点 handle 外还保存 节点名 与 父节点名(rbfResolveNode),用于在新会话或引用变更后尽量找回对象。
限制说明:
- 句柄在 Max 会话内有效,跨会话依赖名称 + 父级匹配。
- 若重命名、重组层级或合并场景导致匹配失败,需在 UI 中重新拾取驱动并检查被驱动列表。
# 常见问题与注意事项
- 至少需要 2 个姿态样本 才能构建;状态栏会提示「需要构建 RBF」直到构建成功。
- 清除所有 只删样本,不删驱动与被驱动;删样本后须重新 创建姿势 并 构建 RBF。
- 新增被驱动 后,旧姿态中新通道无数据,需针对新骨骼补采样或重新录入姿势。
- Twist-X / Swing-Quat 与 Quat(Full) 的几何含义不同,请勿混用概念。
