
 复制黏贴 动画POSE工具
复制黏贴 动画POSE工具
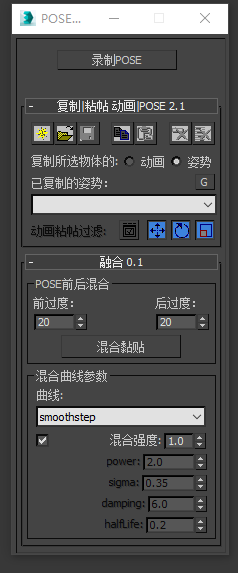
# 复制黏贴 动画POSE工具 - 2.1
- 录制POSE,记录选择骨骼的数值变化,自动创建POSE。
- 黏贴混合,黏贴POSE时自动混合,省去创建动画层再黏贴POSE的操作,直接一步到位。
提示
- 现在想要插件的 捐赠 9.9之后找我要下载链接(网站
关于页面中有收款码),想白嫖请等到2026-05-01 更新天晴盒子。 - 使用过程中任何问题可联系我解决。
# 录制姿势功能使用说明
这一节对应主面板 复制|粘帖 动画|POSE 的姿势录制与回贴流程,适合先保存关键姿态,再在时间线上做前后过渡混合。
# 基本流程(建议)
- 点击
【录制】开始录制。 - 然后选中对象,设置动作姿势(可多选,建议保持层级完整)。
- 设置好姿势POSE,再次点击
【录制】 结束录制,会自动恢复录制前的姿势。 - 在姿势下拉列表确认条目已出现(可继续保存到
.pac)。 - 移动时间滑块到目标帧,设置:
前过度:向前混合帧数(in)后过度:向后混合帧数(out)
- 点击
混合黏贴,将录制姿势按当前曲线和强度混入时间段。
提示
目前仅支持POSE黏贴混合,动画黏贴还不支持
# 常见误区
- 在
动画 模式下点击复制,录到的是动画轨道,不是单帧姿势。 - 只选了子物体没选完整层级,回贴时可能出现局部偏差。
- 过渡区间太短 + 强曲线,容易出现“突然贴姿势”的硬切感。
# Blend 曲线说明(动画权重)
本文针对脚本中的各类混合曲线在动画里的行为差异、优缺点与调参建议。
目标是:在 in/out 融合区间内,把 target 平滑混入,同时尽量避免“卡顿、塌速、过冲、硬切”。
# 1. 权重语义(先统一概念)
前过度:黏贴位置的前面多少帧作为过渡区。
后过度:黏贴位置的后面多少帧作为过渡区。
- 例如:前 20 ,后 20 ,在 50 帧黏贴POSE:
- 在第30帧处开始混合,到50帧完整,70帧处结束混合。
- 例如:前 20 ,后 20 ,在 50 帧黏贴POSE:
设
w为target的混合权重,范围[0,1]w=0:保持原动画(base)w=1:完全使用 target在当前实现中,常见写法:
- 位置/缩放:
out = base*(1-w) + target*w - 旋转:
outRot = slerp(baseRot, targetRot, w)或“差值旋转叠加”版本
- 位置/缩放:
曲线本质是“把线性时间参数 t∈[0,1] 映射为权重 w”,即 w = f(t)。
# 2. 各曲线特点

# #linear
- 公式:
w=t - 特点:变化均匀、最直观
- 优点:可预测、便于调试
- 缺点:边界一阶导不平缓,接缝容易显“硬”
- 适用:快速验证流程、排查逻辑问题
# #smoothstep(quintic smootherstep)
- 公式:
w = 6t^5 - 15t^4 + 10t^3 - 特点:两端导数接近 0,进出更柔和
- 优点:通用性强,通常比 linear 更自然
- 缺点:中段力度相对温和,可能“贴 target 不够狠”
- 适用:默认首选,绝大多数场景稳定
# #sine
- 公式:
w = 0.5 - 0.5*cos(pi*t) - 特点:节奏感自然,曲线平滑
- 优点:视觉上“顺”,常用于相机/角色过渡
- 缺点:中心段提升速度固定,精细控制不如 power
- 适用:希望手感自然、不过分强调 target 峰值
# #power
- 公式:
w = t^p(p为blend_weight_curve_power) - 参数:
p>1:前慢后快(更晚贴近 target)0<p<1:前快后慢(更早贴近 target)
- 优点:调参直觉强,控制“贴合时机”很方便
- 缺点:端点平滑性不如 smootherstep/sine
- 适用:需要明确控制“何时更贴 target”
# #gaussian
- 说明:当前实现是“高斯型单调归一化”,近似中心聚焦型贴合
- 参数:
blend_weight_curve_gaussian_sigmasigma小:更集中、更尖锐sigma大:更平缓、更分散
- 优点:可做“强中心、弱两侧”的感觉
- 缺点:参数敏感;过小会显得突兀
- 适用:强调 target 附近姿态,但不想全段都强干预
# #critDamped(临界阻尼)
- 说明:使用临界阻尼 step 响应归一化
- 参数:
blend_weight_curve_damping- 值大:更快贴近 target
- 值小:更缓慢
- 优点:无振荡、收敛干净,工程上很稳
- 缺点:如果阻尼过大,可能出现“中段过快贴合”
- 适用:希望“快速但不抖”的技术型过渡
# #inertial
- 说明:指数衰减型(半衰期控制)归一化,接近惯性化手感
- 参数:
blend_weight_curve_inertial_halflife- 值小:反应快
- 值大:更“拖拽”、更慢
- 优点:手感常较自然,适合动作切换过渡
- 缺点:参数不当时会显“拖泥带水”或“贴合太慢”
- 适用:希望保留动势、减少突兀切换
# 3. 如何选型(实战建议)
先按目标选择:
- 想要稳妥默认:
#smoothstep - 想更自然:
#sine - 想可控调强弱:
#power(先试p=2~4) - 想中心更强:
#gaussian(先试sigma=0.30~0.45) - 想技术上“快收敛不振荡”:
#critDamped(先试damping=5~8) - 想惯性过渡手感:
#inertial(先试halflife=0.12~0.30)
# 4. 常见问题与定位
# A. target 处“速度变慢 / 卡顿”
常见原因:
- 目标是“单帧静态姿态”,在中心被强行拉停
- 权重峰太尖(过快贴合)
- 旋转使用方式与位置权重语义不一致
处理建议:
- 先试
#sine或#inertial - 降低
#gaussian的尖锐程度(增大sigma) - 若用
#power,降低p
# B. 混合“看不出来”
检查:
target与 base 差值是否本来就很小- 融合区间是否太短(
sp_in/sp_out太小) - 权重是否接近 0(打印
target_w验证)
# C. 过渡太“硬”
优先顺序:
linear -> smoothstep/sine- 增加融合区间长度
- 调低贴合强度(power 降 p,gaussian 增 sigma)
# 5. 推荐默认配置(可作为起点)
type = #sine
power = 2.0
gaussian_sigma = 0.35
damping = 6.0
inertial_halflife = 0.2
1
2
3
4
5
2
3
4
5
如果主要问题是“中心掉速”,先把类型设为:
type = #inertial
inertial_halflife = 0.16
1
2
2
